
微波车辆检测器的应用
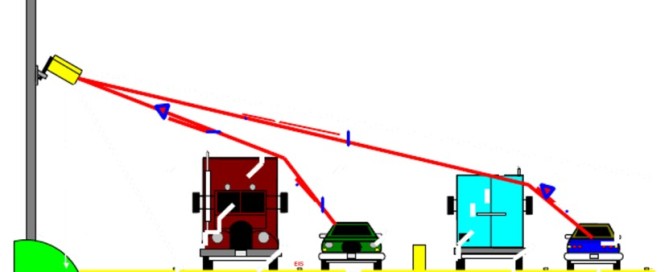
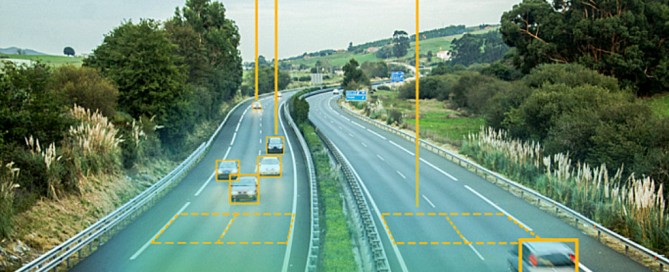
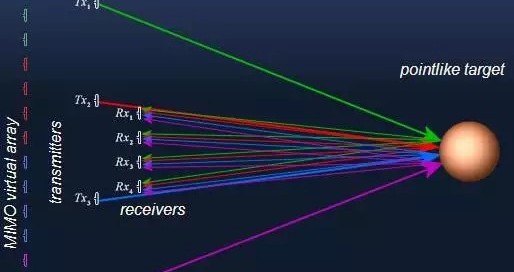
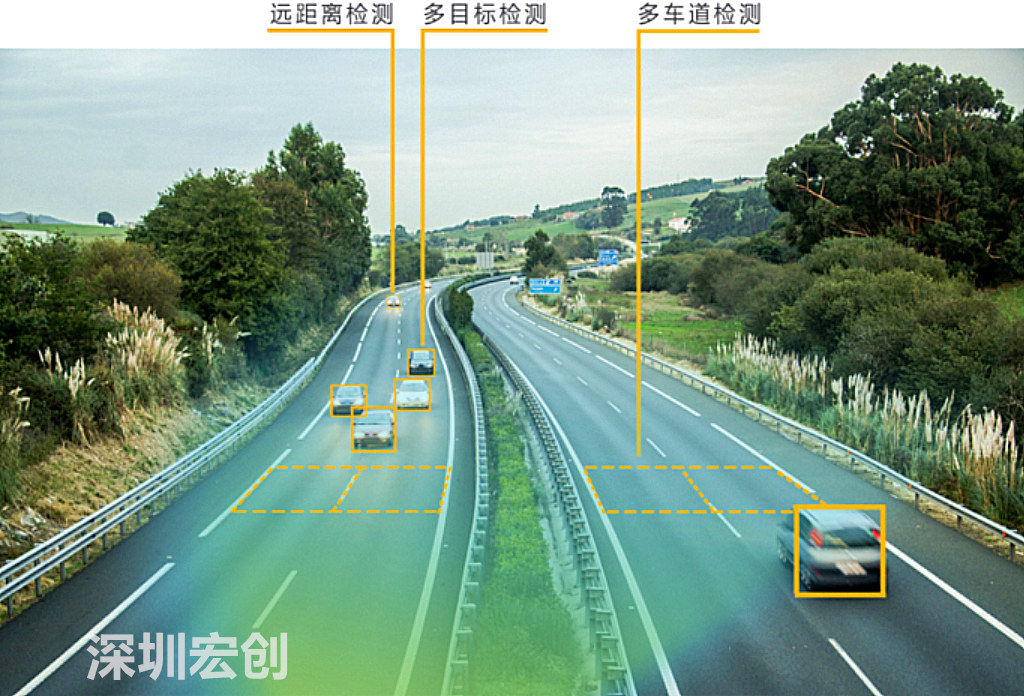
微波车辆检测器的应用 一、 什么是微波车辆检测器(RTMS) RTMS(Remote Traffic Microwave Sensor 远程交通微波雷达检测器)是一种用于监测交通状况的再现式雷达装置。它可以测量微波投影区域内目标的距离,通过距离来实现对多车道的静止车辆和行驶车辆的检测,并且利用雷达线性调频技术原理,对路面发射微波,通过对回波信号进行高速实时的数字化处理分析,检测车流量、速度、车道占有率和车型信息等交通流基本信息的非接触式交通检测设备。 二、 微波车辆检测器的应用领域 微波车辆检测器(RTMS)主要应用于高速公路、城市快速路、普通公路交通流调查站和桥梁的交通参数采集,提供车流量、速度、车道占有率和车型等实时信息,此信息可用隔离接触器连接到控制器或通过串行接口连接到其他系统,为交通控制管理、信息发布等提供数据支持。 三、传统微波车辆检测器存在的缺陷 1、测速精度差 在车流量较小、不同车辆行驶速度差距较大的情况下 ,传统微波车辆检测器的单车瞬时车速测速精度非常差。在车流量很大 ,车辆行驶速度相差不大的情况下,车辆平均速度的精度大概仅能达到在90%左右。 2、采用测装方式,会出现小车被边道大车遮挡的问题,造成漏车问题。 3、 安装环境苛刻,只能够安装于平坦笔直的道路,需要独立的安装杆件。 四、多目标雷达的优势 多目标雷达采用先进的多目标跟踪技术,与传统微波车检器不同,能够实时跟踪64个目标,准确获取每个车辆的x、y坐标。可采用正向或斜向安装,极高的速度精度,测速精度可达99%。安装非常便捷,不受安装地点的地形条件影响。



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}