

机器视觉在交通中的应用总结
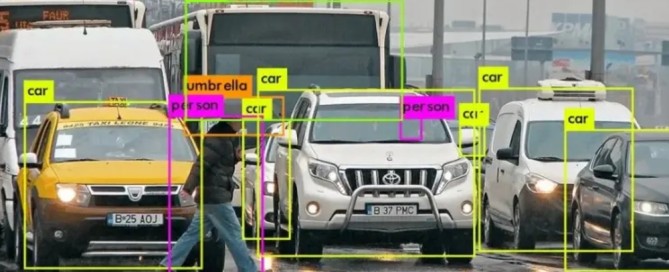
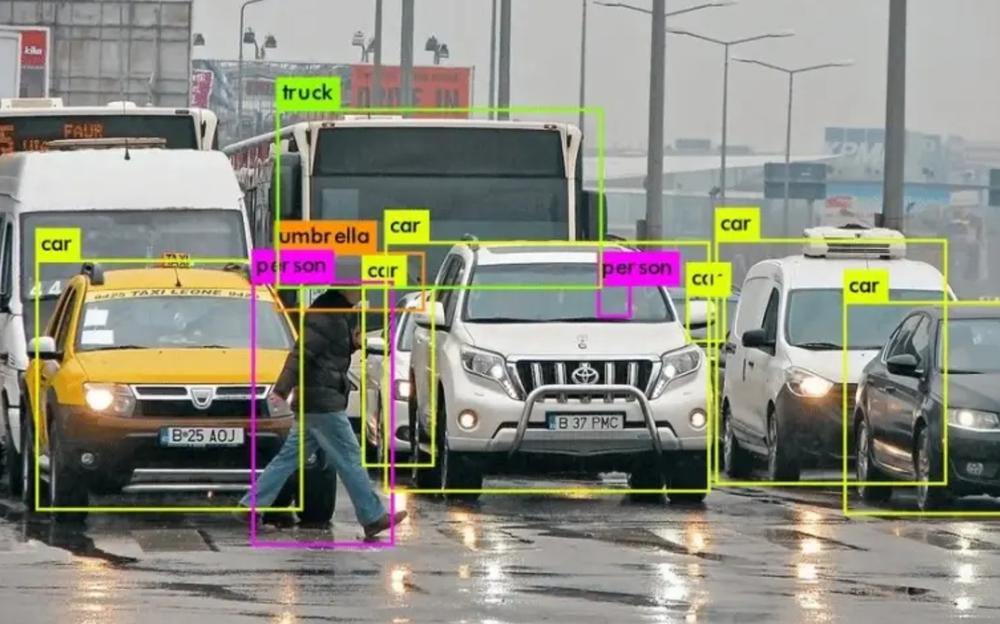
机器视觉在交通中的应用总结 在科技蓬勃发展的当下,我们的日常出行逐渐融入了诸多先进的科技元素,机器视觉便是其中关键的一项。在智能交通体系中,机器视觉的应用极为广泛,涵盖自动车牌识别、违法停车检测、行人检测、交通流量分析以及行车违章识别等多个方面。接下来,本文将对机器视觉在智能交通中的具体应用展开详细阐述。 1、车牌识别 车牌识别技术(ANPR)作为计算机视觉与模式识别技术在现代智能交通系统中的重要研究课题,是推动交通管理智能化进程的关键环节。该技术旨在从复杂的背景中精准提取并识别运动车辆的牌照,借助获取原图像、图像预处理、车牌定位、字符分割以及字符识别等一系列技术手段,实现对车辆牌号、颜色等关键信息的准确识别。 车牌识别技术在交通领域的应用已历经多年,但在实际场景中,部分车牌的识别仍颇具挑战。例如,大角度倾斜的车牌,过去很长一段时间都难以得到有效解决,车牌识别技术在过去 3 - 5 年甚至陷入了发展瓶颈。然而,近年来随着深度学习技术的应用,这一难题取得了重大突破。如今,各类姿态和角度的车牌都能被精准识别。当前,最新技术水平下字母和数字的识别率高达 99.7%,汉字的识别率也达到了 99%。 2、行车违章检测 如今,城市道路上的摄像头数量日益增多,计算机视觉技术也越来越多地被应用于自动检测交通违规行为,像超速、闯红灯、不遵守停车标志、逆向行驶以及非法转弯等。这一技术在高速公路和城市交叉口的应用尤为广泛。不过,早期由于存在较多误报情况,实际检测效果与实际需求存在一定差距。而深度学习技术的出现,使得精准检测交通违章和交通事件成为可能,能够切实为交通运营部门提供及时、准确的报警信息。 3、停车占用检测 在机器视觉技术应用之前,传统的地磁感知方式虽能检测车位是否被占用,但存在成本高昂、系统可靠性欠佳等问题。相比之下,基于视频和图像的路侧违法停车感知与抓拍技术优势明显。仅需一台摄像机,就能对大片区域的停车位进行实时监控和状态感知,不仅成本低廉,而且能直观呈现车位的实际占用情况。 4、行人检测 行人检测(Pedestrian Detection)是运用计算机视觉技术,对图像或视频序列中是否存在行人进行判断,并实现精确定位的技术。该技术常与行人跟踪、行人重识别等技术相结合,广泛应用于人工智能系统、车辆辅助驾驶系统、智能机器人、智能视频监控、人体行为分析以及智能交通等多个领域。 行人具有刚性和柔性物体的双重特性,其外观容易受到穿着、尺度、遮挡、姿态以及视角等多种因素的影响,这使得精确的行人检测成为一项极具挑战性的任务。在检测过程中,需要用到多种类型的传感器,如传统的闭路电视(CCTV)、IP 摄像机、热成像设备、近红外成像设备以及车载 RGB 摄像头等。目前,常见的行人检测方法主要有基于全局特征的方法、基于人体部位的方法以及基于立体视觉的方法。值得一提的是,基于深度卷积神经网络的行人检测技术已取得显著进展,甚至能够检测出被深度遮挡的行人。 5、交通流量分析 当前,中国许多城市面临着严峻的交通拥堵问题,不少十字路口的红绿灯配时并非处于最优状态。在缓解城市交通拥堵方面,机器视觉将发挥重要作用。 在交叉口,借助基于深度学习的车辆精确感知检测技术,可以精确获取交通路口各个方向的车辆数量、流量以及密度等信息,从而为交通路口的最优配时提供准确依据。若各个路口都能采用这种车辆检测技术,将极大地缓解交通拥堵状况。 在路段方面,通过对路段的感知,利用原有监控系统可以获取道路的总体交通路况。借助车辆检测技术,能够为道路路况分析、交通大数据的收集以及交通规划等提供可靠的数据支持。








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}