
3D多车道雷达
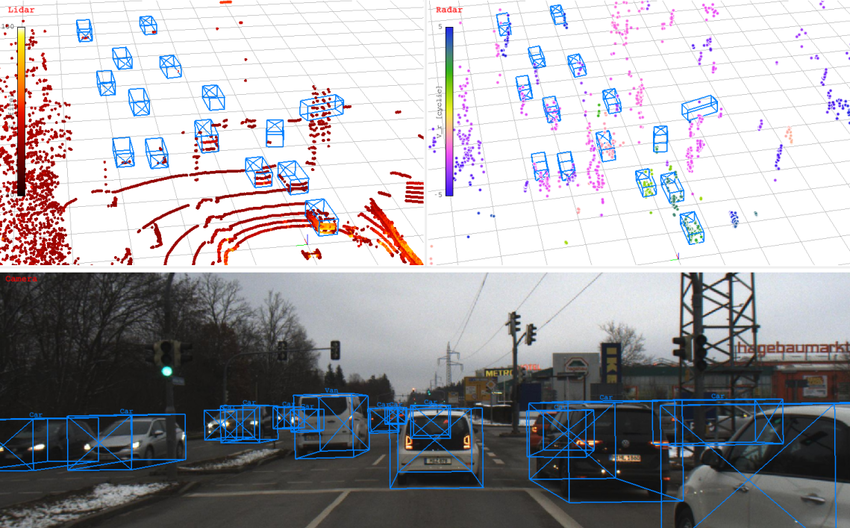
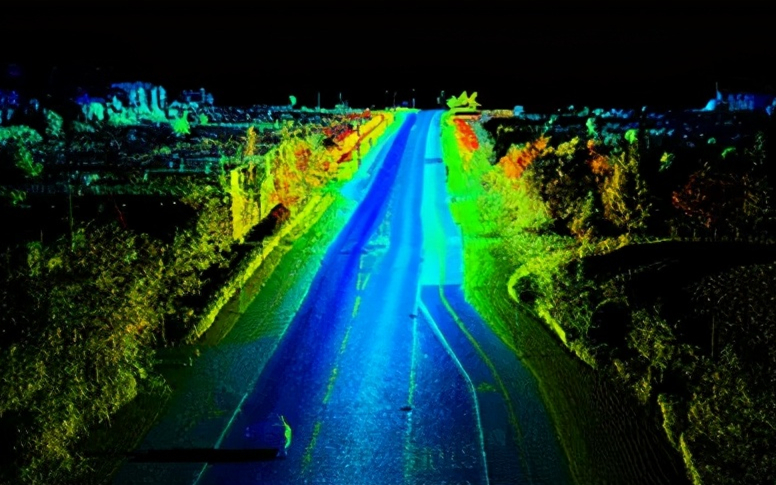
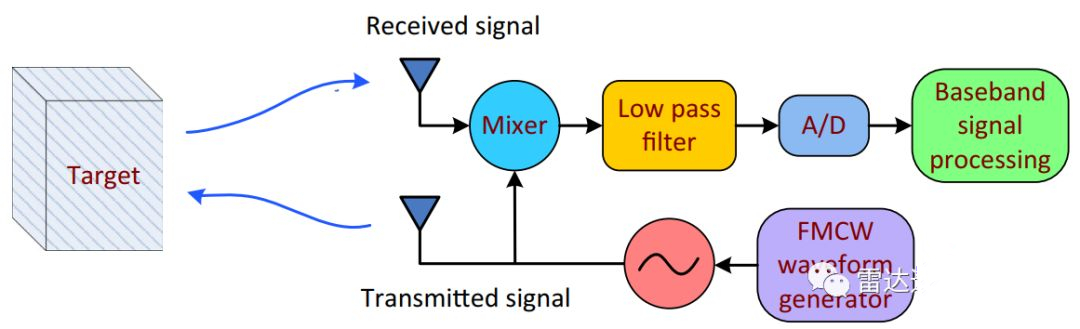
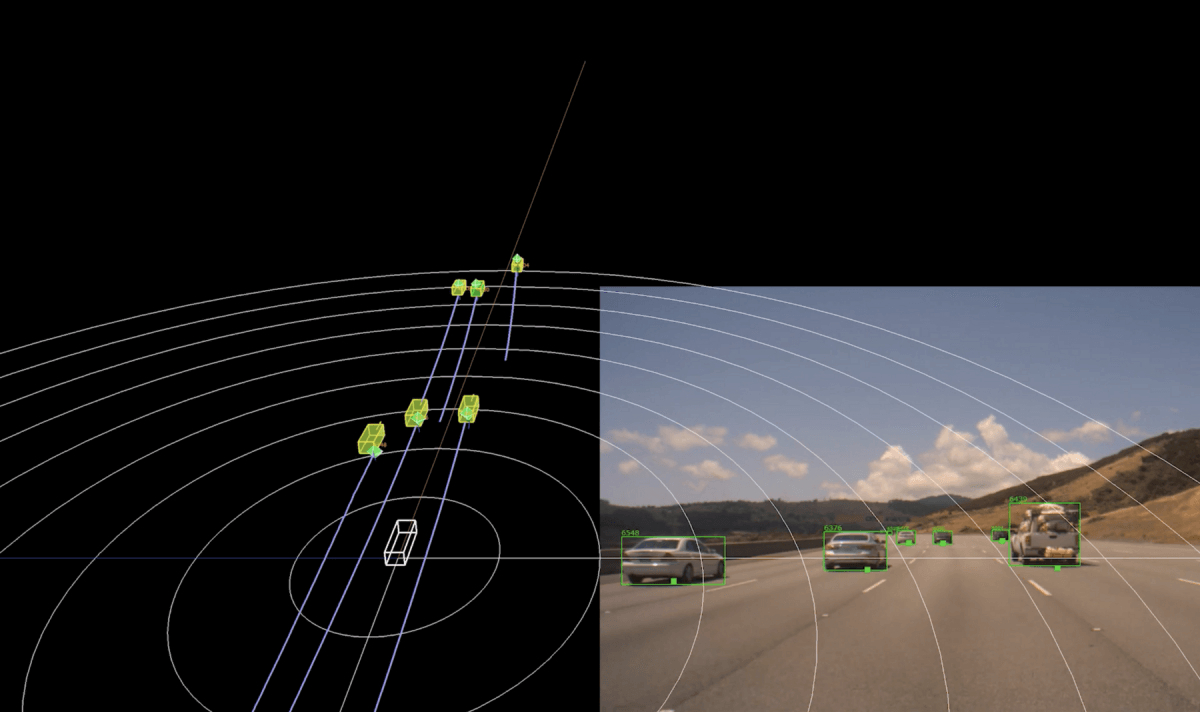
3D多车道雷达 在智能交通系统的庞大体系中,精准感知能力无疑是决定其成败的核心要素。3D多车道雷达,凭借其卓越的性能和独特的技术优势,正在成为智能交通系统中至关重要的一环,如同 “超级眼睛” 一般,为整个系统提供了精确、全面的环境感知信息,引领着智能交通技术迈向新的高度。 一、毫米级精度的技术突破 1、多波束矩阵架构:精密测角的核心支撑 在雷达技术领域,测角精度是衡量其性能优劣的关键指标之一。传统雷达在测角方面往往存在较大的误差,难以满足现代智能交通系统对于高精度的严格要求。而 3D 多车道雷达通过采用先进的 128 通道有源相控阵天线,实现了令人惊叹的 ±0.1° 测角精度,相较于传统雷达,提升幅度高达 30 倍。 128 通道有源相控阵天线是3D多车道雷达多波束矩阵架构的核心组件。它由众多微小的天线单元组成,这些单元能够独立地发射和接收电磁波信号。通过对每个天线单元发射信号的相位和幅度进行精确控制,雷达可以实现对不同方向波束的灵活调整。这种精确的波束控制技术使得雷达能够在极窄的角度范围内准确地探测目标物体的位置。 在实际应用中,多波束矩阵架构的优势体现得淋漓尽致。以高速公路场景为例,当多辆汽车在不同车道上行驶时,传统雷达可能难以准确分辨相邻车辆的具体角度,导致对车辆行驶轨迹的判断出现偏差。而 3D 多车道雷达凭借其 ±0.1° 的高精度测角能力,能够清晰地识别每一辆车的精确位置和行驶方向,为后续的交通管理和自动驾驶决策提供了可靠的依据。 2、动态补偿算法:极端环境下的精度守护者 在复杂多变的交通环境中,温度、振动等外界因素会对雷达的精度产生显著影响。振动抑制技术主要用于解决车辆行驶过程中的振动对雷达精度的干扰。无论是在平坦的高速公路上,还是在颠簸的乡村道路上,车辆都会不可避免地产生振动。这种振动会使雷达的天线发生微小的位移,从而导致雷达信号的发射和接收出现偏差。3D多车道雷达的振动抑制技术采用了先进的传感器和算法,能够实时监测雷达的振动情况,并通过对信号的处理和补偿,消除振动带来的影响。在一辆行驶在崎岖山路上的车辆上安装3D多车道雷达,即使车辆颠簸剧烈,雷达依然能够稳定地工作,准确地探测周围的交通状况。 3、超分辨成像技术:测距精度的巨大飞跃 传统雷达在测距方面存在较大的误差,通常只能达到米级精度,这在对精度要求极高的智能交通领域是远远不够的。3D多车道雷达采用了先进的压缩感知算法,实现了超分辨成像技术,将传统雷达的米级测距误差压缩至 ±2mm,实现了测距精度的巨大飞跃。 压缩感知算法是一种基于信号稀疏性的新型信号处理技术。在雷达信号处理过程中,它能够从少量的采样数据中恢复出高分辨率的目标图像。传统雷达为了获得较高的分辨率,需要采集大量的数据,这不仅增加了系统的复杂度和成本,还会导致数据处理时间延长。而压缩感知算法通过利用目标物体在某些变换域中的稀疏特性,只需要采集少量的关键数据,就能够重构出目标物体的精确图像。 在实际应用中,超分辨成像技术使得3D多车道雷达能够对目标物体进行极其精确的测距。在城市道路的交通监控中,对于正在等待信号灯的车辆队列,3D多车道雷达可以精确测量每辆车之间的间距,误差仅为 ±2mm。这一高精度的测距能力为智能交通系统中的车距保持、碰撞预警等功能提供了有力的支持。 二、智能交通场景的深度赋能 1、智慧路口解决方案 智慧路口是智能交通系统的重要组成部分,它通过对路口交通流量的实时监测和优化控制,提高路口的通行效率,减少交通事故的发生。3D多车道雷达在智慧路口解决方案中发挥着关键作用。 构建3D空间坐标系是3D多车道雷达在智慧路口应用的重要基础。通过在路口安装多个3D多车道雷达,它们可以协同工作,对路口的空间进行精确的测量和定位,从而构建出一个完整的3D空间坐标系。在这个坐标系中,每一辆车、每一个行人的位置和运动轨迹都能够被精确记录和跟踪。基于这个3D空间坐标系,雷达可以实时生成路口车辆轨迹热力图。热力图以直观的方式展示了路口不同区域的车辆密度和行驶速度,交通管理人员可以通过热力图清晰地了解路口的交通拥堵情况,及时调整信号灯的配时方案,优化交通流量,提高路口的通行效率。 在实际应用中,3D多车道雷达对闯红灯识别准确率的提升效果显著。在引入3D多车道雷达之前,闯红灯识别准确率仅为 82%,由于传统监测设备存在一定的局限性,部分闯红灯行为难以被准确捕捉。而安装3D多车道雷达后,闯红灯识别准确率大幅提升至 99.3%。3D多车道雷达凭借其高精度的目标识别和跟踪能力,能够准确判断车辆是否存在闯红灯行为,并及时将相关信息传输给交通管理系统,对违规车辆进行有效监管,维护了路口的交通秩序。 2、车路协同新范式 车路协同是智能交通系统的重要发展方向,它通过实现车辆与道路基础设施之间的信息交互和协同控制,提高交通系统的整体效率和安全性。3D多车道雷达在车路协同领域开创了新的范式。 实现路侧单元与车载雷达的厘米级时空同步是车路协同的关键技术之一。3D多车道雷达通过先进的时间同步和空间校准技术,确保路侧单元和车载雷达在时间和空间上的高度一致性。这种厘米级的时空同步精度使得车辆和道路基础设施之间能够准确地共享信息,包括车辆的位置、速度、行驶方向等。在车辆接近路口时,路侧单元可以通过与车载雷达的时空同步,及时将路口的交通状况、信号灯状态等信息传输给车辆,车辆则可以根据这些信息提前做出行驶决策,避免在路口发生拥堵和碰撞事故。 三、传感器融合升级 随着智能交通系统的不断发展,对传感器的综合性能要求越来越高。单一的传感器往往存在一定的局限性,难以满足复杂多变的交通环境的需求。因此,传感器融合升级成为 3D多车道雷达未来发展的重要方向之一。 3D多车道雷达与激光雷达的融合具有显著的优势。激光雷达通过发射激光束并测量反射光的时间来获取目标物体的距离信息,具有较高的分辨率和精度,尤其在近距离探测方面表现出色。而3D多车道雷达则在远距离探测和恶劣天气适应性方面具有优势。将两者结合,构建 “远距雷达 + 近场激光” 的感知矩阵,可以实现优势互补。在自动驾驶场景中,当车辆在高速公路上行驶时,3D多车道雷达可以对远处的车辆和障碍物进行远距离探测和预警,为车辆提供足够的反应时间;而当车辆在城市街道等复杂环境中行驶时,激光雷达可以对近距离的行人、车辆和其他障碍物进行高精度的识别和定位,确保车辆的行驶安全。 这种传感器融合不仅能够提高感知的准确性和可靠性,还能够拓展感知的范围和维度。通过对3D多车道雷达和激光雷达获取的数据进行融合处理,可以得到更加全面、精确的环境信息,为自动驾驶车辆和智能交通系统提供更加可靠的决策依据。






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}