
车载雷达的发展方向
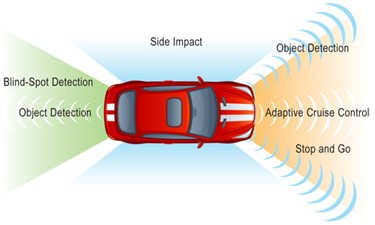
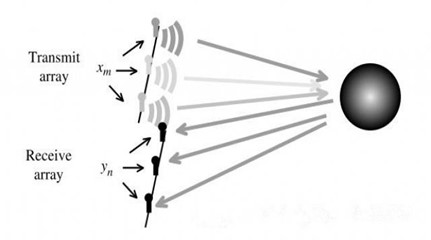
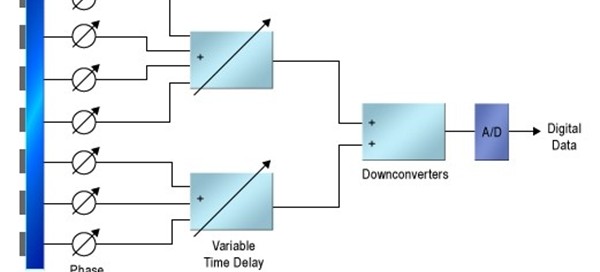
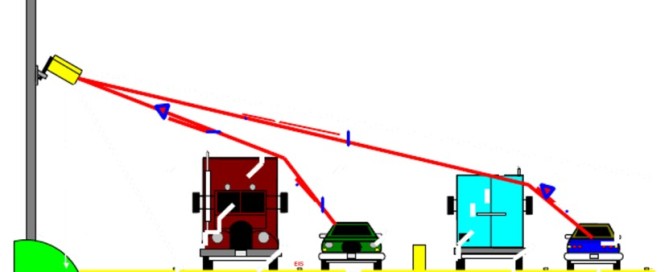
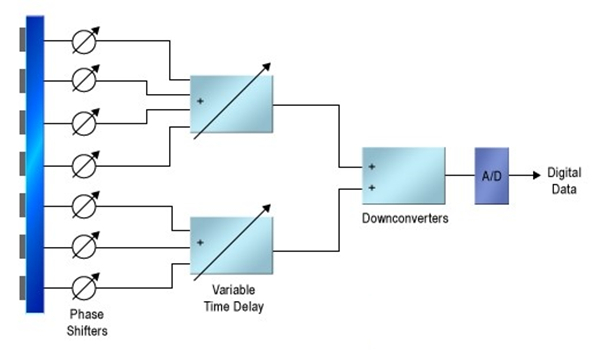
车载雷达的发展方向 在未来的几年里,雷达技术将在高级辅助驾驶系统(ADAS)的演进中发挥关键作用。随着其功能的不断拓展,雷达的发射与接收模块、信号处理机制以及自动规避风险的能力,将促使车辆ADAS系统逐渐具备类似于战斗机上战术系统的特性,从而对汽车系统的设计带来深远的影响。 为什么是雷达? 在最近的一次采访中,Reuter 提到:“值得注意的是,ADAS 感应技术中,只有雷达不受天气条件的影响。虽然摄像头在目标识别方面表现优异,但雷达在探测物体及其速度测量方面更为出色。”Reuter 解释说,正因为如此,许多侧重于目标检测和风险分类的早期系统倾向于采用雷达技术。他还提到:“在欧洲,对于卡车紧急制动系统有着强烈的需求,而这类系统就是基于雷达的。” 雷达系统首先会部署一个中距离的前视装置,用于监测前方的道路情况。然而,这种系统很快就会进化为多传感器融合的形式,不仅包含远距离的前视功能,还包括用于全方位危险评估的短距离传感器,正如图1所展示的那样。 图1.雷达系统能够进行前向搜索,以及观察车辆四周。 尽管光学视觉系统已经相当成熟,但雷达系统的优点将进一步提升其性能。Reuter 预见,在不远的未来,具备目标识别能力的多摄像头系统将能够整合视频与雷达数据,从而构建出周围环境的动态模型。 采集信号 要理解雷达对汽车系统设计的影响,首先需要了解传感器的作用。大多数汽车雷达系统倾向于使用24 GHz或77 GHz的免许可频段。雷达的发射器通常采用频率调制连续波(FMCW)的设计,这种设计会发射出一种在频域内迅速变化的信号,通常称为“啁啾”,如图2所示。 图2.车载雷达将使用啁啾类型的FMCW。 Reuter 解释道:“FMCW 最大的优势在于它简化了对反射信号的解读过程。可以从反射频率中直接获取目标的距离信息,并从多普勒频移中推断出目标的速度。相较于脉冲调制方案,生成连续波(CW)较为简单,易于理解和确保可靠性,这正是汽车制造商最为关注的,因为他们认为投入到ADAS改进中的每一欧元都是直接关系到企业利润的。” 接收信号的设计同样需要成本低廉且创新的方法。为了收集方位信息,反射信号可以通过机械扫描天线或相控阵天线来获得,并且通常结合了数字波束形成算法。天线后方往往配备有多通道的零差接收机,这是为了满足天线设计的需求——例如,一个简单的旋转天线阵列可能包含16个通道。 Reuter 补充说:“接收机的输出信号是在 DC 至 20 MHz 范围内的基带信号。”为了实现具有良好方位角分辨率的系统设计,可能需要 8 到 16 个通道,并且相应地需要 8 到 16 个高速模数转换器(ADC)。 从啁啾中提取信息 每个通道产生的数字基带信号会被输入到快速傅里叶变换(FFT)模块中进行处理,变换长度可达到2K样本点。Reuter 表示:“在过去,执行 FFT 需要用到大量的 FPGA。而现在,发展趋势是使用集成浮点 DSP 加速器的 32 位微控制器。”通过双 FFT 模块,波束形成系统可以从信号中提取出距离和速度数据,如图3所示。 图3.聚束以及范围和速度估算的FFT配置。




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}