

视频检测技术在智能交通中的深度应用与改进
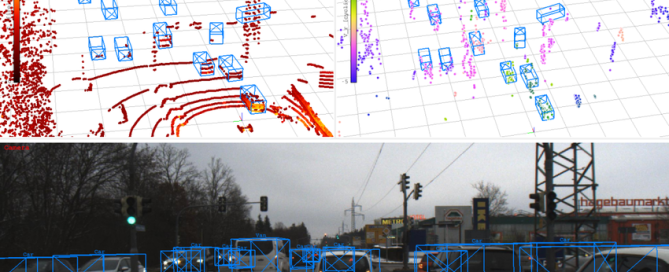
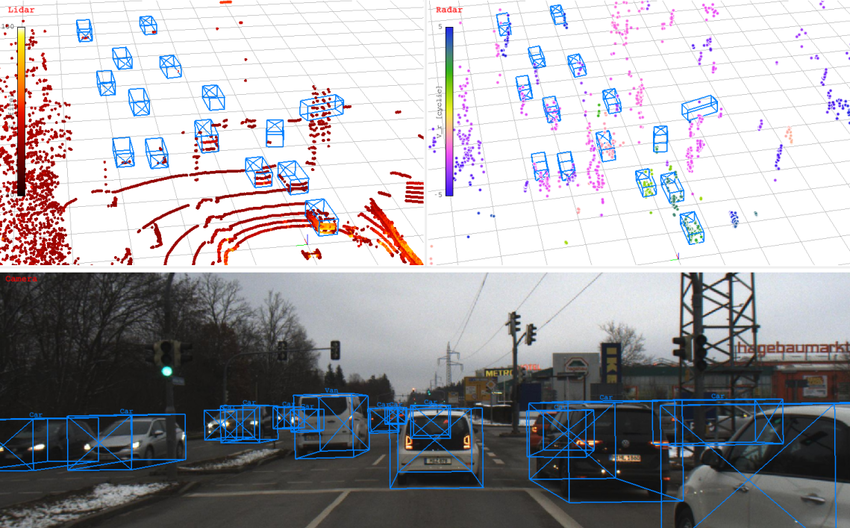
视频检测技术在智能交通中的深度应用与改进 在当今科技飞速发展的时代,智能交通系统成为城市现代化建设的重要组成部分。其中,视频检测技术凭借其独特的优势,在智能交通领域发挥着举足轻重的作用。它模拟人眼视觉机制,融合先进的图像处理算法,能够从复杂的视频流中精准提取交通目标的运动轨迹、空间位置及行为特征,为交通管理提供关键数据支持,助力实现高效、安全、智能的交通环境。 一、视频检测技术的核心原理与演进 视频检测技术的核心原理是模仿人类视觉感知过程,通过一系列复杂而精妙的技术手段,对视频中的交通信息进行深度挖掘和分析。其核心技术涵盖多个关键领域: 1. 目标检测与跟踪 基于深度学习的 YOLO 系列算法(如 YOLOv8),作为目标检测领域的佼佼者,采用单阶段检测框架。这一框架打破了传统检测算法分阶段处理的模式,大大提高了检测速度,能够在短时间内对视频中的车辆、行人等目标进行实时定位。在城市交通的复杂场景中,每秒可能有大量的图像帧需要处理,YOLOv8 凭借其高效的网络结构和快速的计算能力,能够迅速识别出各个目标的位置和类别,为后续的交通分析提供基础数据。 而 DeepSORT 算法则专注于解决多目标跨帧追踪问题。在实际交通场景中,车辆和行人不断移动,不同帧之间的目标可能存在遮挡、变形等情况,这给追踪带来了极大的挑战。DeepSORT 算法利用卡尔曼滤波技术,对目标的运动状态进行预测和更新,结合重识别特征,即使目标在不同帧中发生了外观变化,也能准确判断其身份,从而确保目标轨迹的连续性。例如,在一条车流量较大的街道上,车辆频繁出现遮挡和交错行驶的情况,DeepSORT 算法能够稳定地跟踪每一辆车,为交通流量统计和行为分析提供准确的轨迹数据。 传统方法如光流法、立体视觉技术也在复杂场景下发挥着重要作用。光流法通过分析图像中像素强度的变化,计算像素的运动向量,从而获取目标的运动信息。在一些特殊场景中,如夜间或低光照环境下,光流法可以辅助深度学习算法,更准确地识别目标的运动轨迹。立体视觉技术则利用双目摄像头获取的视差信息,对目标进行深度估计,实现对目标的三维定位,在复杂的交通场景中,有助于更精确地判断目标的位置和距离。 2. 场景理解与行为分析 语义分割技术(如 U-Net)在视频检测中扮演着关键角色,它能够对道路、车道线、信号灯等交通元素进行像素级标注。通过这种精细的标注,系统可以清晰地分辨出不同的交通场景元素。结合时空上下文信息,系统能够判断车辆是否存在压线、逆行等违章行为。在一个十字路口,通过语义分割技术对视频图像进行处理,系统可以准确识别出车道线和车辆的位置,再根据车辆在一段时间内的运动轨迹,判断其是否违反交通规则。 动态事件检测算法则通过对序列图像的深入分析,识别出事故停车、拥堵、行人横穿等突发状况。它不仅关注单个图像中的信息,还会综合考虑连续多帧图像的变化情况。一旦检测到异常事件,系统会立即触发实时预警,通知交通管理部门及时采取措施。例如,当检测到某路段出现事故停车时,系统会迅速发出警报,并将事故位置和相关图像信息发送给交警部门,以便及时疏导交通,减少事故对交通的影响。 3. 多模态数据融合 随着技术的不断发展,超高清视频(4K/8K)与毫米波雷达、激光雷达数据的融合成为提升视频检测技术性能的重要手段。超高清视频提供了丰富的视觉细节,能够清晰地呈现交通场景中的各种元素。毫米波雷达和激光雷达则具有高精度的距离测量能力,能够弥补视频检测在距离感知方面的不足。通过将这些不同类型的数据进行融合,可以扩展检测范围与精度。在高速公路上,超高清视频可以清晰地拍摄到远处车辆的外观和行驶状态,毫米波雷达和激光雷达则可以精确测量车辆的距离和速度,两者结合,能够更全面、准确地掌握交通状况。 二、深度应用场景与行业赋能 视频检测技术凭借其强大的功能,已经广泛渗透到交通管理的各个环节,为整个行业带来了显著的效率提升和安全保障。 1. 交通违法智能取证 电子警察系统作为交通违法取证的重要工具,充分利用视频检测技术中的车牌识别(VLPR)与行为分析功能。它能够自动抓拍闯红灯、压黄线、不按车道行驶等多达 12 类违章行为,并且识别率超过 99%。在城市的各个路口,电子警察系统 24 小时不间断地工作,通过高清摄像头捕捉车辆的行驶画面,利用先进的算法对车牌进行识别,同时分析车辆的行驶轨迹和行为,一旦发现违章行为,立即抓拍并记录相关信息,为交通执法提供有力证据。 无人机执法则为交通管理带来了新的视角和灵活性。搭载高清摄像头的无人机可以轻松到达传统设备难以覆盖的区域,如应急车道、隧道内等交通管理的盲区。某城市在试点无人机执法后,应急车道占用、隧道内变道等违章行为的发生率下降了 40%。无人机可以在高空对特定区域进行实时监控,发现违章行为后及时进行抓拍和记录,有效地遏制了这些违规行为的发生。 2. 交通状态感知与优化 流量监测是交通管理中的重要环节,基于深度学习的车辆计数算法能够实时统计路口的车流密度、速度等关键信息。通过对视频图像的分析,算法可以准确地识别出车辆,并计算其数量和速度。这些数据为信号灯配时优化提供了有力的数据支持。根据实时的车流情况,交通管理部门可以调整信号灯的时长,使交通流量更加顺畅。在一个繁忙的十字路口,通过实时监测车流密度和速度,将绿灯时间适当延长给车流量较大的方向,能够有效缓解交通拥堵。 拥堵预警也是视频检测技术在交通管理中的重要应用。结合历史数据与实时视频信息,系统可以预测拥堵的扩散趋势,并生成合理的绕行方案。某高速路段在应用这一技术后,事故响应时间缩短了 30%。当系统检测到某路段出现拥堵迹象时,会迅速分析历史数据和实时路况,预测拥堵可能扩散的范围和时间,同时为驾驶员提供绕行建议,引导车辆避开拥堵路段,提高道路的通行效率。 3. 安全防控与应急响应 在事故快速处置方面,无人机发挥着重要作用。它可以在 5 分钟内迅速抵达事故现场,通过三维建模与热成像技术辅助救援。在某高速公路的事故案例中,无人机利用三维建模技术对事故现场进行快速建模,为救援人员提供详细的现场地形和车辆位置信息,热成像技术则可以帮助救援人员快速发现被困人员,大大提高了救援效率,使救援效率提高了 30%。 驾驶员行为监控也是保障交通安全的重要措施。基于面部识别与眼动追踪技术,系统可以实时检测驾驶员是否存在疲劳驾驶、分心操作等风险。一旦检测到异常行为,系统会立即触发声光报警,提醒驾驶员注意安全。据统计,这一技术的应用降低了 60% 的人为事故率,有效地保障了道路交通安全。 4.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}