

多目标跟踪雷达的原理与应用
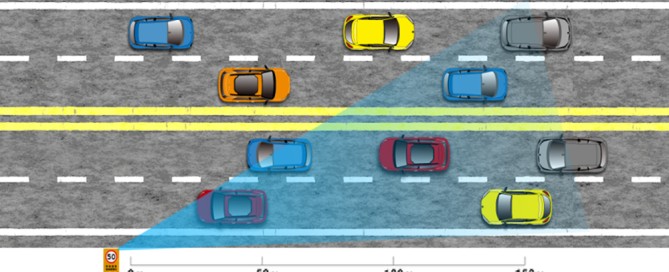
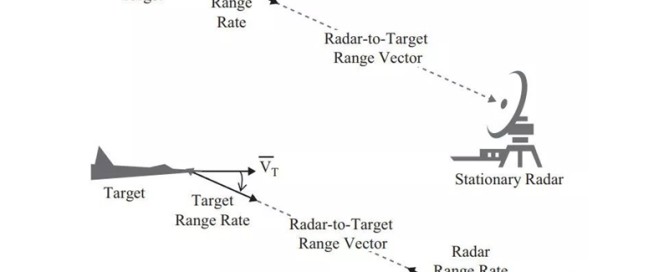
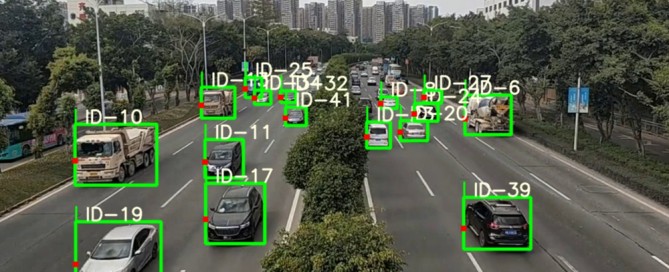
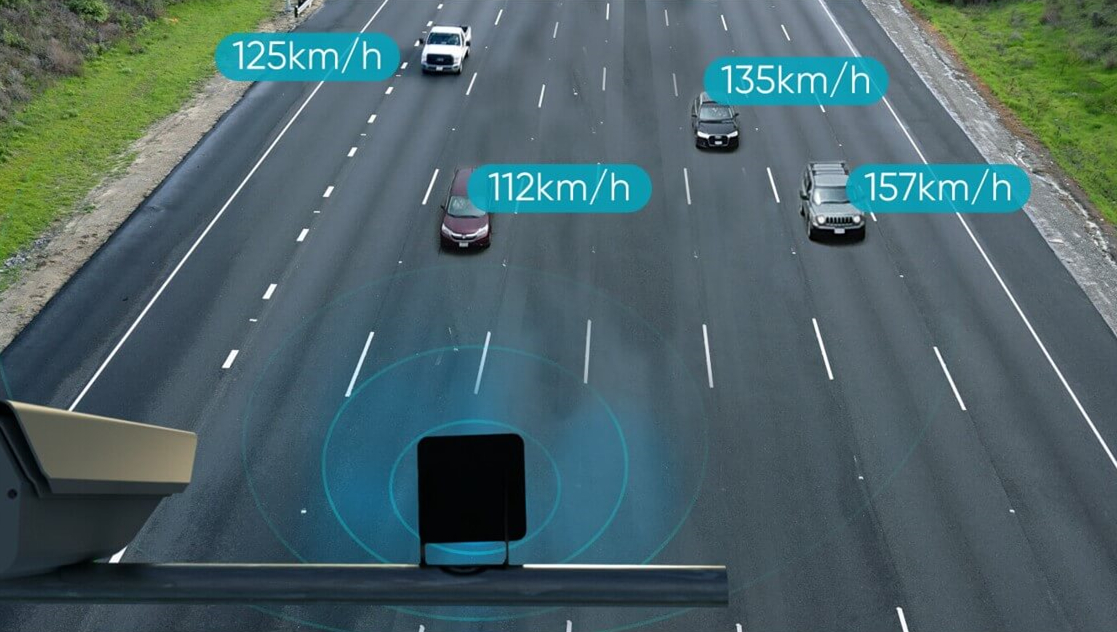
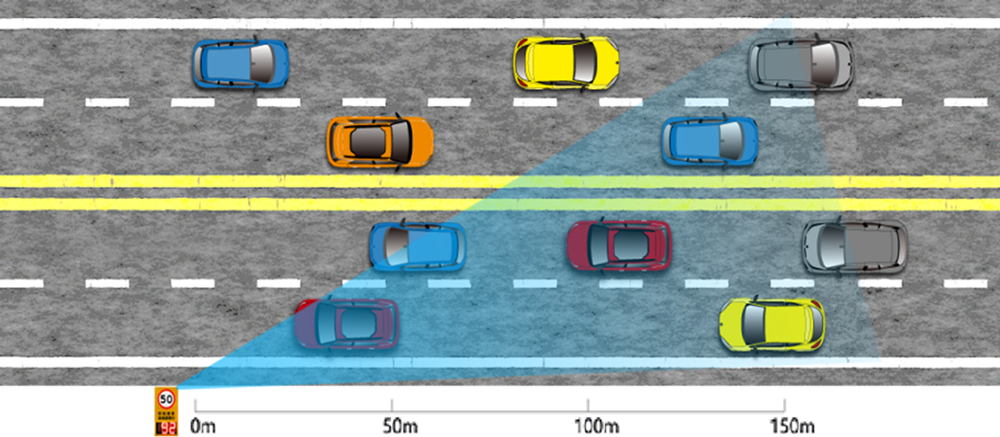
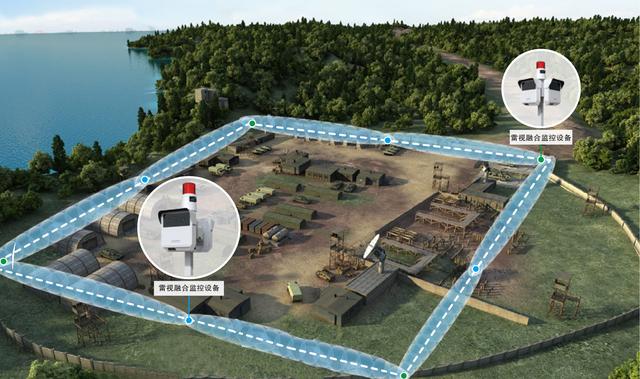
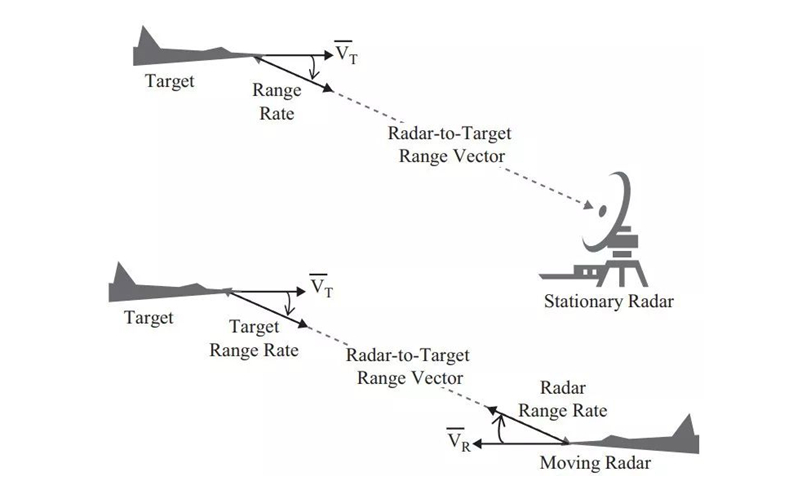
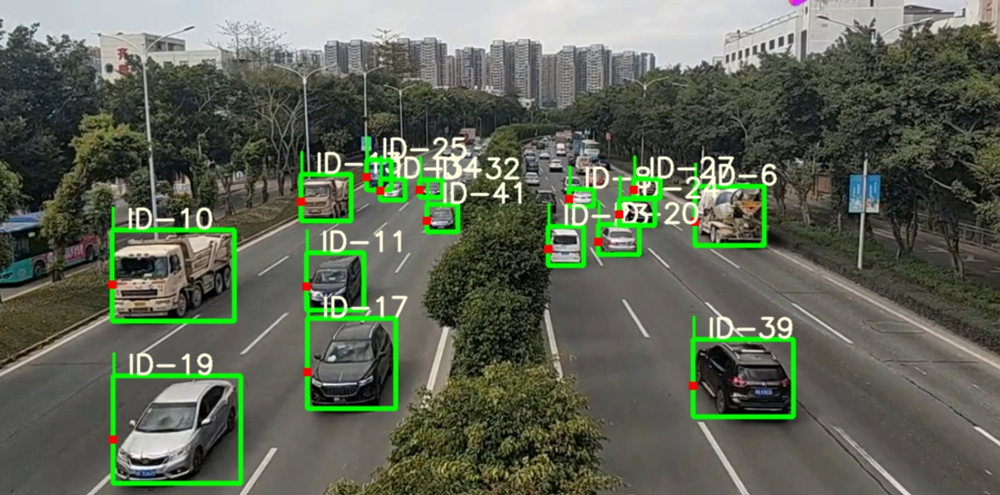
多目标跟踪雷达的原理与应用 一、多目标跟踪雷达原理详解1、mimo雷达的工作原理MIMO(Multiple-Input Multiple-Output)雷达,即多输入多输出雷达,它的工作原理有其独特之处。与传统雷达相比,MIMO雷达配备了多个发射天线和多个接收天线。在工作时,多个发射天线同时发射相互正交的波形信号,这些信号在空间中传播,遇到目标后会发生反射。反射回来的回波被多个接收天线接收,由于各发射信号相互正交,接收端能够依据独特的编码方式区分出不同发射天线所对应的回波,进而获取更多关于目标的信息,如目标的方位、距离、速度,甚至是目标的形状、结构等细节,实现对目标更为精准、全面的探测。 2、目标信息获取方式FMCW 通过发射频率随时间线性变化的连续波信号,当信号遇目标反射后,回波与发射信号产生的频率差与目标距离成正比,经混频、频谱分析及计算可获取目标距离信息;同时,利用目标相对雷达径向运动产生的多普勒频移与速度成正比的特性,处理多个连续 chirp 信号获取速度信息;还可运用天线阵列波束形成技术,如相位干涉法或 MUSIC 算法,比较不同天线接收回波的相位差或幅度差来确定目标角度信息。3、中频信号的分析处理中频信号分析处理是 FMCW 雷达系统中的关键环节,主要包括信号预处理、频谱分析、目标检测与参数估计以及信号后处理等步骤。首先,在信号预处理阶段,对中频信号进行滤波、放大和采样等操作,以提高信号质量并将其转换为离散数字信号。其次,利用快速傅里叶变换进行频谱分析,并通过频谱校正方法提高频率测量精度,获取信号的频谱特征。然后,依据频谱特征进行目标检测,通过测量频谱中的频率差和偏移量,结合雷达系统参数,实现目标距离和速度的估计。最后,在信号后处理过程中,进行数据融合和目标跟踪,以提高目标检测和参数估计的准确性和可靠性,获取目标的运动轨迹等信息。4、目标航迹跟踪算法目标轨迹跟踪的原理主要基于对目标状态的持续估计和更新,以构建目标的运动轨迹。首先,利用卡尔曼滤波等滤波算法进行目标轨迹跟踪时,会基于目标的运动模型,例如匀速直线运动模型或匀加速直线运动模型等,对目标的下一个时刻的状态进行预测。这个预测是根据前一时刻的目标状态,如位置、速度等,以及预设的运动模型参数来进行的。然后,当接收到当前时刻的观测值,将预测值与观测值进行融合。通过滤波算法中的更新方程,根据观测值与预测值之间的误差,以及观测噪声和系统噪声的统计特性,来修正预测的目标状态,从而得到当前时刻更准确的目标状态估计,包括更精确的位置、速度等信息。随着时间的推移,不断重复上述预测和更新的过程,就可以逐步构建出目标的运动轨迹,实现对目标的持续跟踪。在多目标跟踪场景中,除了上述单目标跟踪的基本原理外,还需要解决目标关联的问题。由于多个目标同时存在,需要确定当前时刻检测到的每个目标与之前跟踪的目标中哪一个是同一目标。通常会采用一些关联算法,如最近邻法、概率数据关联法等,计算当前时刻每个检测目标与已有跟踪目标之间的关联程度,如距离、相似度等。然后根据关联程度将检测目标与跟踪目标进行匹配,对于匹配成功的目标,按照单目标跟踪的原理进行状态更新和轨迹维持;对于新出现的未匹配目标,则启动新的跟踪轨迹;对于丢失关联的目标,根据一定的规则判断是否终止跟踪。通过不断地进行目标关联、状态更新和轨迹管理,实现对多个目标的同时跟踪。 二、多目标跟踪雷达的应用领域1、智能交通管理多目标跟踪雷达在智能交通管理领域有着广泛而重要的应用。它可实时统计车流量并分析变化趋势,为交通管理部门提前制定应对措施提供依据;能精确监测车速并抓拍违章,还支持区间测速,有效遏制超速行为;通过跟踪车辆轨迹,可分析车辆行为,对异常行为及时预警,助力事故原因分析与责任认定;其数据可用于优化交通信号控制,实现自适应信号控制,提高路口通行效率。极大地提升了智能交通管理的水平和效率。 2、安防监控 复杂多变安防环境,多目标跟踪雷达以全天候、远距离、精准探测优势,筑牢关键区域安全防线。于机场、车站、监狱等重点场所,雷达构建无形防护网,实时监测入侵目标。一旦异常,迅速锁定、精准定位,联动监控、报警系统,通知安保处置。如周界安防雷达,采用相参预警技术,无缝覆盖监测区,无惧光照、风雨、沙尘,精准识别人员、车辆闯入,过滤飞鸟、落叶等干扰,降低误报率;智能安防系统中,融合视频、红外、雷达多传感器数据,多维度复核目标,提升预警可靠性,为安保决策提供有力支撑。 3、市场驱动因素与挑战 多目标跟踪雷达市场蓬勃发展,背后蕴含多重驱动因素。军事层面,地缘政治紧张局势促使各国强化国防力量,先进多目标跟踪雷达是构建现代化防空反导体系关键,对隐身目标探测、低空突防目标拦截意义重大,如俄乌冲突中,双方对战场态势感知需求激增,刺激多目标跟踪雷达需求上扬。 民用拓展是另一增长引擎。智能交通深度变革出行方式,车路协同、自动驾驶技术依赖多目标跟踪雷达实时感知车辆、行人动态,城市交通智能化升级催生海量雷达部署需求;工业 4.0 时代,工厂自动化生产线引入雷达监控物料、机器人运行,保障生产流程顺畅;安防监控领域,从城市周界到关键设施,多目标跟踪雷达全天候守护,精准预警入侵,为社会安全筑牢防线。 然而,市场发展亦面临诸多挑战。成本居高不下是制约普及的关键,高端多目标跟踪雷达因核心技术垄断、复杂工艺、高性能材料,研发生产成本高昂,民用领域客户望而却步,限制市场下沉与规模化应用。 法规标准不完善在民用领域尤为突出,自动驾驶、无人机管控等新兴应用场景缺乏统一、适配的雷达技术规范与安全标准,阻碍产品认证推广,企业研发、市场准入无所适从,亟需行业协同、政府引导,完善法规生态,护航多目标跟踪雷达市场稳健前行。






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}